
 在现代社会,随着生活节奏的加快,越来越多的人开始寻求科技的帮助来减轻日常家务的负担。
在现代社会,随着生活节奏的加快,越来越多的人开始寻求科技的帮助来减轻日常家务的负担。
斯坦福大学的李飞飞团队最近推出了一款全新的“保姆型”人形机器人,这款机器人不仅能够完成倒垃圾、整理衣物、刷马桶等家务,还具备更高的自主性和可靠性。
通过他们开发的“行为机器人套件”(BRS),这款机器人可以更好地应对各种家庭任务,真正成为家庭的好帮手。
这款机器人是基于一个综合性的框架,旨在让机器人在执行日常家务时更为自主和高效。
团队特别强调,虽然人类轻而易举的家务对机器人来说却是一个不小的挑战。
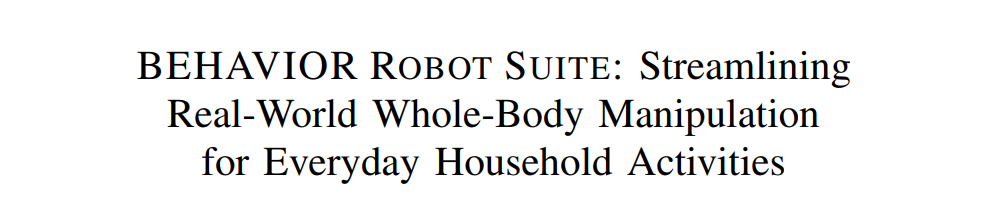
为了克服这一难题,研究团队设计了一个具有双臂、灵活躯干和移动底座的机器人硬件,这样的设计使得机器人能够在复杂的家庭环境中灵活移动和操作。
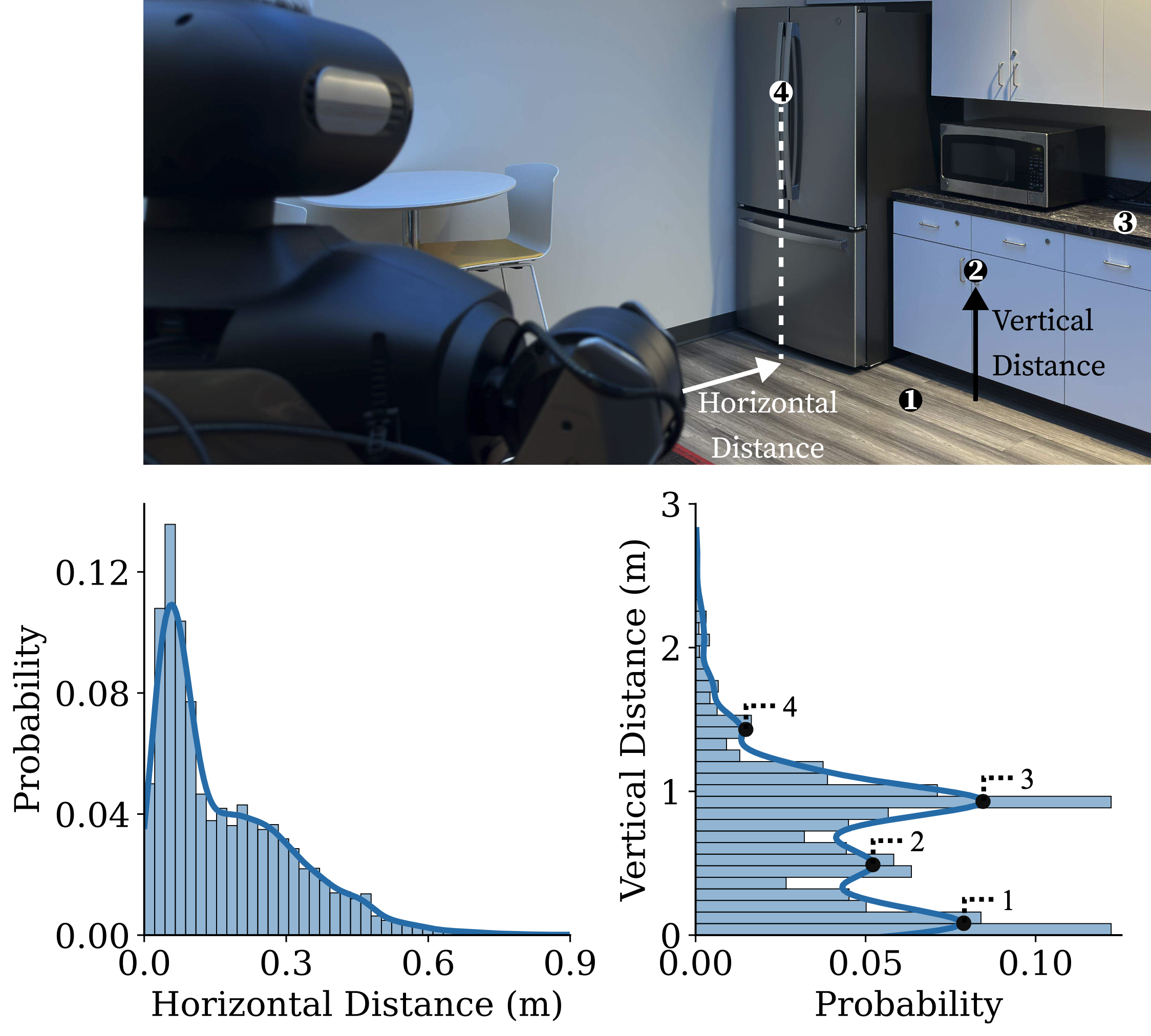
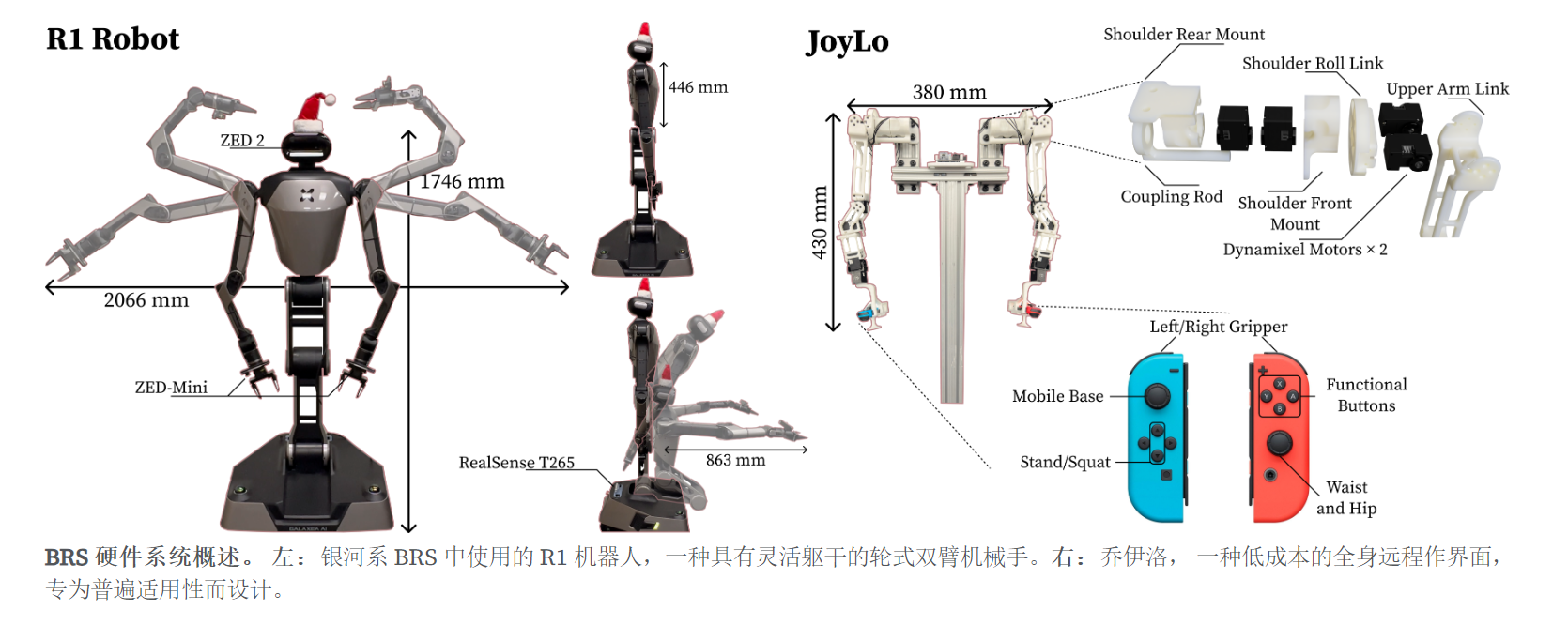
图1:日常家庭活动中涉及的任务相关对象的生态分布。 左:水平距离分布服从长尾分布。右:垂直 距离分布呈现多种不同的模式,位于 1.43 m、0.94 m、0.49 m 和 0.09 m,表示通常发现家居物品的高度。值得注意的是,多模态 垂直距离的分布突出了广泛的末端执行器可达性的必要性, 使机器人能够跨各种空间配置与对象进行交互。
为了实现全身操控,团队还推出了JoyLo,这是一种利用Nintendo Switch手柄的经济高效遥操作界面。
通过JoyLo,用户可以直观地控制机器人的全身动作,帮助机器人协调复杂的运动,比如弹吉他等。
这种设计不仅降低了使用门槛,也提高了数据收集的效率,为机器人的学习提供了高质量的数据支持。
在学习算法方面,团队开发了WB-VIMA,这是一种专门用于学习全身视觉运动策略的创新算法。
通过模仿学习,WB-VIMA能够准确建模机器人的全身动作,并有效协调各个关节之间的运动。
这一算法的核心在于它能够理解上游部位的微小动作对下游部位的影响,从而实现更精准的全身运动。

在实验中,研究团队选择了五项具有代表性的家庭任务,包括倒垃圾、整理衣物、刷马桶等,来测试BRS的能力。
机器人在真实环境中完成这些任务,展现出了稳定的双手协调能力、精确的导航能力和广泛的末端执行器可达性。
这些能力的结合,使得机器人能够有效地与家庭中的物品进行交互,完成多样化的家务。

在用户反馈方面,JoyLo的表现也得到了参与者的高度认可。
研究表明,使用JoyLo的成功率远高于其他传统的遥操作界面,参与者普遍认为JoyLo更加用户友好。
这一切都表明,李飞飞团队的这款保姆型人形机器人在家务管理上展现出了巨大的潜力。
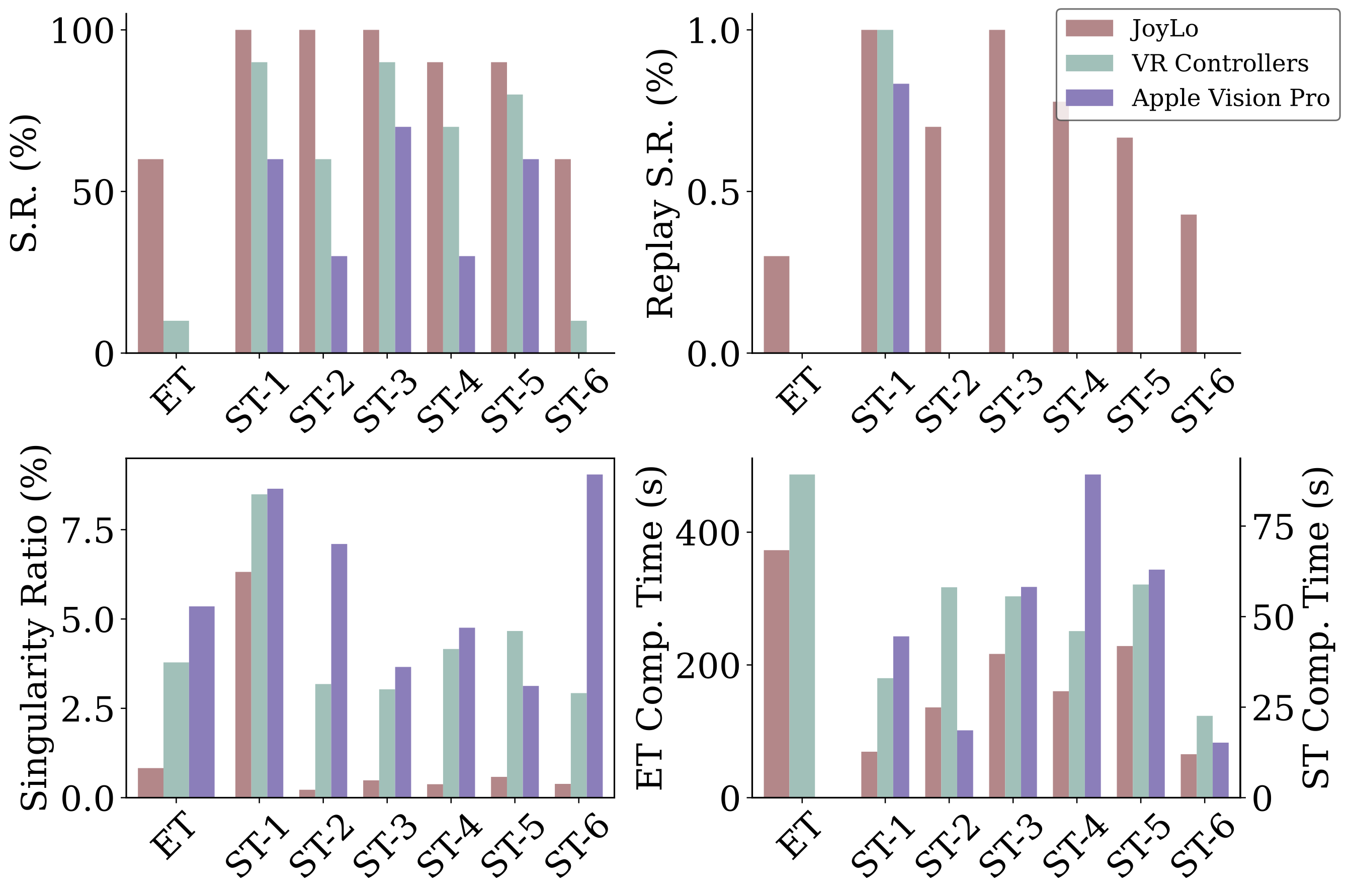
图2:我们衡量成功率(↑,越高越好)和完成时间(↓,越低越好),以 评估效率,并将指标重放成功率 (↑) 和奇异性比率 (↓) 报告给 评估数据质量以学习政策。这里,“成功率”是指 远程作试验,而 “Replay Success rate” 衡量被收集的机器人开环执行的成功 轨迹。这对于随机环境中的长视距任务尤其具有挑战性。更高的重放率 成功表示数据已验证,允许模仿学习策略对收集的轨迹进行建模,而无需 考虑实施例或运动学不匹配。我们报告整个任务 (“ET”) 和单个子任务 (“ST”) 的结果。
总之,李飞飞团队的保姆型人形机器人不仅在技术上实现了突破,更为家庭生活带来了便利。
随着这项技术的不断发展,未来的家庭生活将会变得更加轻松和高效。