
在当今快速发展的机器人技术领域,RoboVerse项目的出现无疑是一个激动人心的里程碑。
这个项目是由来自UC伯克利和北京大学等顶尖高校的研究团队共同打造的,旨在解决机器人领域面临的诸多挑战,尤其是在数据集和评估标准方面的不足。
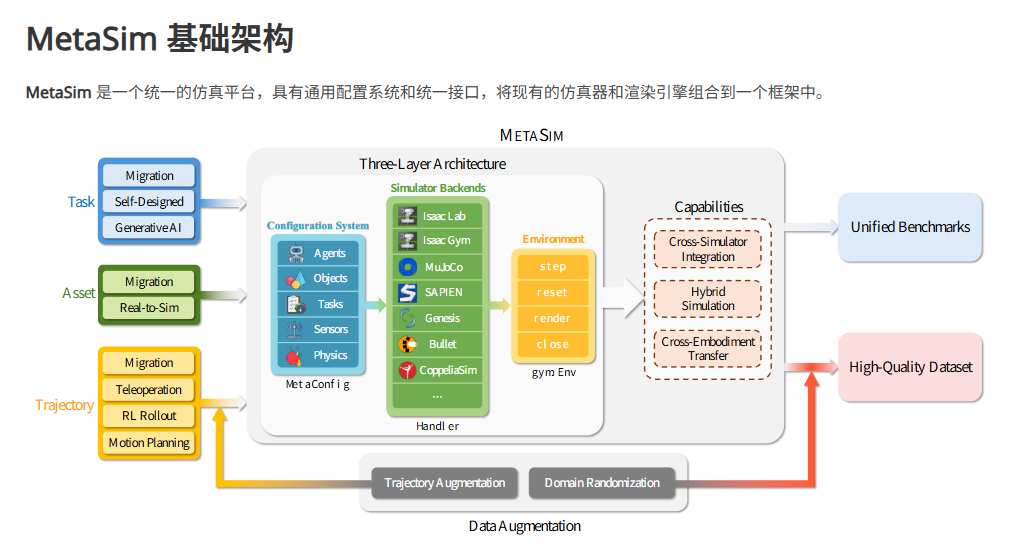
RoboVerse不仅提供了一个统一的仿真平台,还建立了一个大规模的数据集和标准化的评测体系,使得机器人学习变得更加高效和可扩展。

RoboVerse的核心亮点之一是MetaSim,这是一个通用的配置系统和标准接口,能够无缝对接当前主流的机器人仿真器。
想象一下,研究人员可以在不同的仿真平台上运行同一段代码,这样一来,整个社区的研究工作就能更好地整合在一起,推动技术的进步。
此外,RoboVerse还构建了一个前所未有的大规模合成数据集,涵盖了多种任务类型,确保了数据的质量和多样性。
这对于研究人员来说是一个巨大的优势,因为他们可以在一个统一的平台上进行跨平台、跨基准的比较评测,从而更全面地展现算法的性能。
混合仿真是RoboVerse的又一大特色。
通过统一的接口,研究人员可以结合不同仿真器的优势,实现更高的仿真保真度。
例如,使用MuJoCo的精准物理引擎和Isaac Lab的高质量图像渲染,可以让仿真环境更接近真实世界,这对于机器人在现实环境中的表现提升有着重要意义。

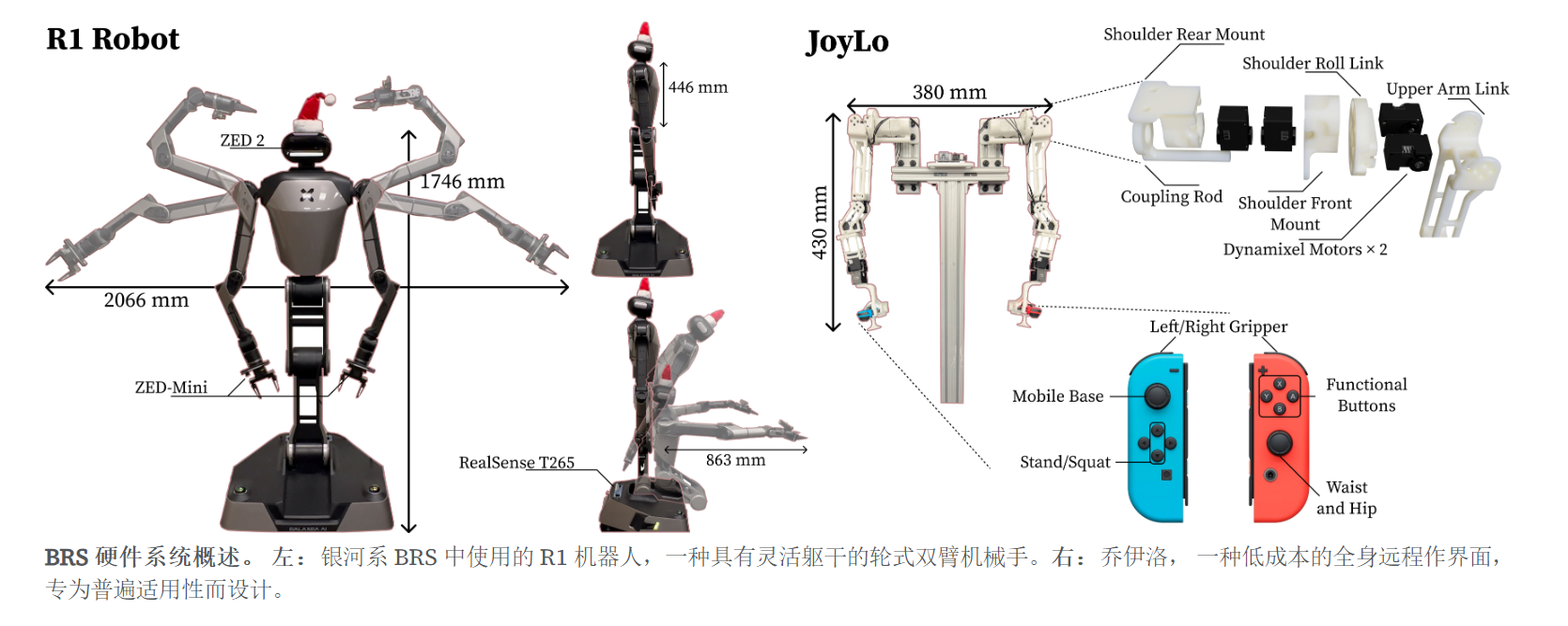
RoboVerse还支持多种遥操作方式,包括手机控制、VR头显等,极大地提升了用户体验和操作的便利性。
用户只需通过手机就能轻松控制机器人,操作流畅自然,打破了传统遥操作的复杂性。
此外,RoboVerse还开发了Real2Sim工具链,可以从现实世界的视频中重建3D资产,降低了仿真环境构建的门槛。
更令人兴奋的是,RoboVerse利用大语言模型(LLM)探索自动生成任务的可能性。
通过MetaSim的统一任务配置能力,RoboVerse能够自动组合数据集中的资产并生成全新任务,展示了LLM在机器人任务生成方面的巨大潜力。